工业机器人是一种可编程的智能型自动化设备,是应用计算机进行控制的替代人进行工作的高度自动化系统。 机器人是从初级到高级逐步完善起来的,它的发展过程可以分为三代。� 第一代机器人是目前工业中大量使用的示教再现型机器人,它主要由夹持器、手臂、驱动器和控制器组成。 第二代机器人是带感觉的机器人,它具有一些对外部信息进行反馈的能力,诸如力觉、触觉、视觉等。 工业机器人一般由主构架(手臂)、手腕、驱动系统、测量系统、控制器及传感器等组成。
图1 是工业机器人的典型结构。 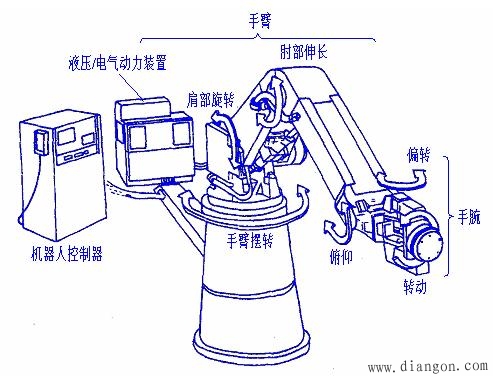 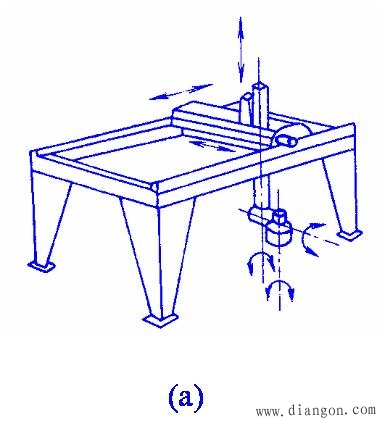  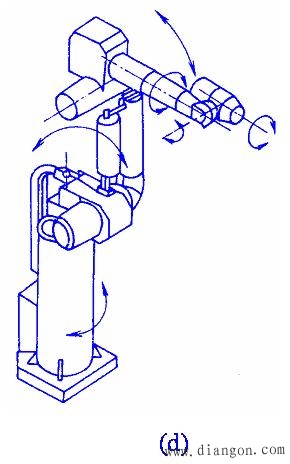 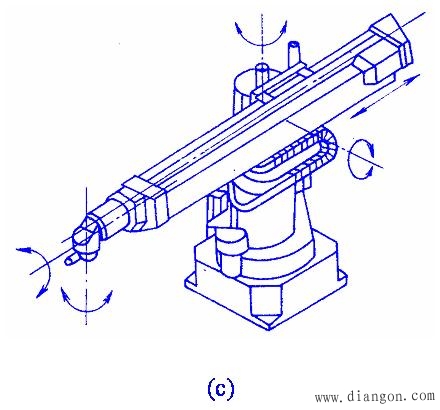  图2 工业机器人的基本结构形式� (a)直角坐标型;(b)圆柱坐标型; (c)球坐标型;(d)多关节型; (e)平面关节型 | 