步进电动机的电枢通断电次数和各相通电顺序决定了输出角位移和运动方向,控制脉冲分配频率可实现步进电动机的速度控制。 因此,步进电机控制系统一般采用开环控制方式。 图1为开环步进电动机控制系统框图, 系统主要由环形分配器、 功率驱动器、 步进电动机等组成。  步进电动机在一个脉冲的作用下, 转过一个相应的步距角, 因此只要控制一定的脉冲数, 即可精确控制步进电动机转过的相应的角度。 但步进电动机的各绕组必须按一定的顺序通电才能正确工作, 这种使电动机绕组的通断电顺序按输入脉冲的控制而循环变化的过程称为环形脉冲分配。 实现环形分配的方法有两种。 一种是计算机软件分配, 采用查表或计算的方法使计算机的三个输出引脚依次输出满足速度和方向要求的环形分配脉冲信号。 这种方法能充分利用计算机软件资源,减少硬件成本, 尤其是多相电动机的脉冲分配更能显示出这种分配方法的优点。 但由于软件运行会占用计算机的运行时间, 因而会使插补运算的总时间增加, 从而影响步进电动机的运行速度。 另一种是硬件环形分配, 采用数字电路搭建或专用的环形分配器件将连续的脉冲信号经电路处理后输出环形脉冲。 采用数字电路搭建的环形分配器通常由分立元件(如触发器、 逻辑门等)构成, 特点是体积大, 成本高, 可靠性差。 专用的环形分配器目前市面上有很多种, 如CMOS电路CH250即为三相步进电动机的专用环形分配器, 它的引脚功能及三相六拍线路图如图2所示。  图2 环形分配器CH250引脚图� (a) 引脚功能; (b) 三相六拍线路图 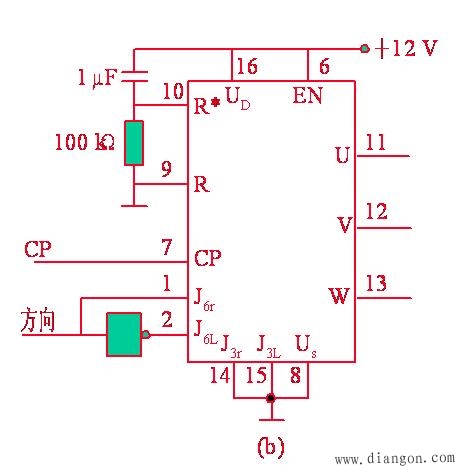 图3 环形分配器CH250引脚图� (a) 引脚功能; (b) 三相六拍线路图 2) 功率驱动 � 常见的步进电动机驱动电路有三种: � (1) 单电源驱动电路 这种电路采用单一电源供电,结构简单,成本低,但电流波形差,效率低,输出力矩小,主要用于对速度要求不高的小型步进电动机的驱动。图4所示为步进电动机的一相绕组驱动电路(每相绕组的电路相同)。  (2)双电源驱动电路 双电源驱动电路又称高、低压驱动电路,采用高压和低压两个电源供电,如图5所示。  (3)斩波限流驱动电路 这种电路采用单一高压电源供电,以加快电流上升速度,并通过对绕组电流的检测,控制功放管的开和关,使电流在控制脉冲持续期间始终保持在规定值上下,其波形如图6所示。这种电路功率大,功耗小,效率高,目前应用最广。图7所示为一种斩波限流驱动电路原理图。   | 