1、微机控制技术的几个基本概念
(1)开环控制与闭环控制
开环控制系统:不将控制的结果反馈回来影响当前控制的系统
闭环控制系统:可以将控制的结果反馈回来与希望值比较,并根据它们的误差调整控制作用的系统
2、PID控制
(1).优点
① 结构灵活 ② 易于熟悉和掌握,整定方便
③ 不需要求出精确数学模型 ④ 控制效果好
(2).原理
PID控制器是一种线性调节器
把设定值x与实际输出值y(t)相减,得到控制偏差(或误差)e (t)。e (t)经比例、积分和微分后通过线性组合构成控制量u(t),对执行机构进行控制。
① P调节(比例调节)
比例调节的控制规律为

② PI调节(比例积分调节)
为了消除比例调节器中残存的静差,在比例调节的基础上加入积分调节,比例积分(PI)调节的控制规律为
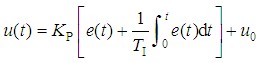
③ PID调节(比例积分微分调节)
通过检测误差的变化率来预报误差,并对误差的变化做出响应,即在PI调节的基础上再加上微分环节,组成比例、积分、微分调节,PID控制规律为
 3.PID控制改进
3.PID控制改进
标准PID控制算式的缺点:
对具有高频扰动的过程,微分作用响应过于灵敏,容易引起控制过程振荡,降低调节品质,计算机对每个控制回路输出时间是短暂的,而驱动执行器动作又需要一定时间,如果输出过大,则在短暂时间内执行器达不到应有指标,会使输出失真。
(1) 不完全微分PID控制算法
在PID控制器中串接一阶惯性环节(低通滤波器),使微分作用来得较小而去得较慢。
(2) 微分先行PID控制算法
给定值的升降会给控制系统带来冲击,使超调量过大,执行机构动作剧烈。
微分先行算法只对被控量y(t)微分,而不对偏差e(t)微分,也就是不对给定值x(t)进行微分。
对许多由于能量或物料的传输延迟而具有纯滞后性质的控制对象而言,抑制超调成为控制系统的主要指标。
纯滞后补偿设计的主要思路:控制不仅要根据目前的偏差,而且要考虑因滞后而影响到目前的过去情况。
4、大林 算法
算法
(1)、原理
在闭环控制系统中,将具有纯滞后性质的控制对象近似为带纯滞后的一阶或二阶惯性环节

(s):

(2)、带纯滞后一阶惯性对象的大林算法
零阶保持器和纯滞后一阶惯性被控对象连续部分的脉冲传递函数为:

振铃现象及其消除
振铃(Ringing)现象,是指数字控制器的输出以二分之一采样频率大幅度波动。
消除振铃现象的方法:
① 找出D(z)中引起振铃现象的因子(z = -1附近的极点),然后令其中的z =1;这样处理不影响输出量的稳态值,但却改变了数字控制器的动态特性,影响闭环系统的瞬态性能
② 选择合适的采样周期T及系统闭环时间常数Tτ, 避免产生强烈的振铃现象。
5、史密斯(Smith)预估控制
(1)、原理
对纯滞后时间为τ的控制对象的控制器,并联一个补偿环节[即史密斯预估控制器GL(s)],使反馈量不受对象滞后的影响,即提前τ对系统作用。
(2)、史密斯预估器的缺点
① 预估器对系统受到的负荷干扰无补偿作用。
② 预估控制系统的效果严重依赖于对象的动态模型精度,特别是纯滞后时间,模型的失配或运行条件的改变都将影响到控制效果。
6、最少拍控制
时间最优控制系统要求:
物理可实现性、稳定性
快速性:系统的输出值尽快跟踪给定值的变化
准确性:稳定后无静差。
最少拍控制设计的局限性:
(1)、对不同输入的适应性差
按单位速度输入设计的最少拍控制器对其他输入的响应特性
(2)、系统输出在采样点之间可能存在纹波
(3)、实现性受限制
(4)、稳定性受限制
7、串级控制
当被控系统中同时有几个干扰因素可能引起同一个被控量的变化时,只控制其中一个因素就不能满足系统的控制要求。
在单回路控制的基础上,增加一个或多个控制副回路,前级调节器的输出作为后级调节器的输入,构成几个调节器串联而成的串级控制系统,可以控制其他影响因素,从而抑制被控对象的时滞特性,提高系统动态响应的快速性,显著提高控制效果。
串级控制系统结构和工作原理

外闭环称为主回路或主环,用于最终保证被调量满足工艺要求;
内闭环称为副回路或副环,用于克服被控对象所受到的主要干扰。对应有两个调节器:
主调节器用于保证系统的控制精度,减小稳态误差,其输入是被调量对给定值的误差,主调节器的输出u1(s)就是副调节器的给定值:
副调节器用于保证系统反应灵敏,其输出作为控制命令送到执行机构。
8、前馈控制原理与结构
前馈控制的典型结构

设:

(s)是被控对象扰动通道的传递函数;

(s)是前馈控制器的传递函数;
G(s)是被控对象控制通道的传递函数;
n,u,y分别为扰动量、控制量、被控量
9、前馈-反馈控制
前馈与反馈控制相结合的控制结构,既能发挥前馈控制对主要扰动的补偿作用,又能保留反馈控制对偏差的控制作用,具有既及时又精确的优点。
10、前馈-串级控制
前馈控制的输出不是直接作用于执行机构,而是补充到串级控制副回路的给定值中,从而降低了对执行机构动态响应性能前馈-串级控制;能及时克服进入前馈回路和串级副回路的干扰对被控量的影响。
