0. 问题的提出
转速开环变频调速系统可以满足平滑调速的要求,但静、动态性能都有限,要提高静、动态性能,首先要用转速反馈闭环控制。转速闭环系统的静特性比开环系统强,这是很明显的,但是,是否能够提高系统的动态性能呢?还得进一步探讨一下。
电力传动的基本控制规律
我们知道,任何电力拖动自动控制系统都服从于基本运动方程式: |
 |
提高调速系统动态性能主要依靠控制转速的变化率 ,根据基本运动方程式,控制电磁转矩就能控制,因此,归根结底,调速系统的动态性能就是控制转矩的能力。 ,根据基本运动方程式,控制电磁转矩就能控制,因此,归根结底,调速系统的动态性能就是控制转矩的能力。
1. 转差频率控制的基本概念
直流电机的转矩与电枢电流成正比,控制电流就能控制转矩,因此,把直流双闭环调速系统转速调节器的输出信号当作电流给定信号,也就是转矩给定信号。
在交流异步电机中,影响转矩的因素较多,控制异步电机转矩的问题也比较复杂。
按照恒 Eg / 控制(即恒 控制(即恒 控制)时的电磁转矩公式(6-12) 控制)时的电磁转矩公式(6-12)
重写为: |
将 代入上式, 代入上式, |
得: |
令 ws = sw1 ,并定义为转差角频率; ,是电机的结构常数; ,是电机的结构常数; |
则 |
当电机稳态运行时,s 值很小,因而 也很小,只有 也很小,只有 的百分之几,可以认为 的百分之几,可以认为 ,则转矩可近似表示为: ,则转矩可近似表示为: |
 |
式(6-61)表明,在s 值很小的稳态运行范围内,如果能够保持气隙磁通 不变,异步电机的转矩就近似与转差角频率 不变,异步电机的转矩就近似与转差角频率 成正比。这就是说,在异步电机中控制,就和直流电机中控制电流一样,能够达到间接控制转矩的目的。 成正比。这就是说,在异步电机中控制,就和直流电机中控制电流一样,能够达到间接控制转矩的目的。
控制转差频率就代表控制转矩,这就是转差频率控制的基本概念。
2. 基于异步电机稳态模型的转差频率控制规律
上面分析所得的转差频率控制概念是在转矩近似公式(6-61)上得到的,当较大时,就得采用式(6-12)的精确转矩公式,把这个转矩特性(即机械特性) ,画在下图 ,画在下图 |
 |
可以看出:
在较小的稳态运行段上,转矩 Te基本上与成正比,
当Te 达到其最大值Temax 时,达到 smax值。 smax值。
对于式(6-12),取 dTe / ds = 0 可得 : |
 |
| 在转差频率控制系统中,只要给限幅,使其限幅值为: |
 |
就可以基本保持 Te与的正比关系,也就可以用转差频率控制来代表转矩控制。这是转差频率控制的基本规律之一。
上述规律是在保持恒定的前提下才成立的,于是问题又转化为,如何能保持恒定?我们知道,按恒 Eg/ 控制时可保持恒定。在上图的等效电路中可得: |
 |
由此可见,要实现恒 Eg/控制,须在Us/ = 恒值的基础上再提高电压 Us 以补偿定子电流压降。
如果忽略电流相量相位变化的影响,不同定子电流时恒 Eg/控制所需的电压-频率特性Us = f (, Is) 如下图所示 |
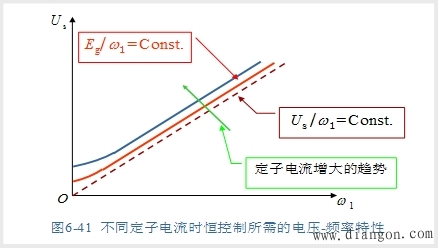 |
上述关系表明,只要 Us 和及 Is 的关系符合上图所示特性,就能保持 Eg/恒定,也就是保持恒定。这是转差频率控制的基本规律之二。
总结起来,转差频率控制的规律是:
(1)在 ≤sm 的范围内,转矩 Te 基本上与成正比,条件是气隙磁通不变。
(2)在不同的定子电流值时,按上图的函数关系 Us = f ( , Is) 控制定子电压和频率,就能保持气隙磁通恒定。
3. 转差频率控制的变压变频调速系统
系统组成
控制原理
性能评价
系统组成 |
 |
控制原理
实现上述转差频率控制规律的转速闭环变压变频调速系统结构原理图如图所示。
频率控制――转速调节器ASR的输出信号是转差频率给定 , ,
与实测转速信号相加,即得定子频率给定信号 ,即 ,即 |
 |
电压控制――由和定子电流反馈信号 Is 从微机存储的 Us = f ( , Is) 函数中查得定子电压给定信号 ,用和控制 PWM电压型逆变器,即得异步电机调速所需的变压变频电源。 ,用和控制 PWM电压型逆变器,即得异步电机调速所需的变压变频电源。
性能评价
式(6-66)所示的转差角频率与实测转速信号相加后得到定子频率输入信号这一关系是转差频率控制系统突出的特点或优点。它表明,在调速过程中,实际频率随着实际转速 同步地上升或下降,有如水涨而船高,因此加、减速平滑而且稳定。
性能评价(续)
同时,由于在动态过程中转速调节器ASR饱和,系统能用对应于sm 的限幅转矩Tem 进行控制,保证了在允许条件下的快速性。
性能评价(续)
由此可见,转速闭环转差频率控制的交流变压变频调速系统能够象直流电机双闭环控制系统那样具有较好的静、动态性能,是一个比较优越的控制策略,结构也不算复杂。
然而,它的静、动态性能还不能完全达到直流双闭环系统的水平,存在差距的原因有以下几个方面:
(1)在分析转差频率控制规律时,是从异步电机稳态等效电路和稳态转矩公式出发的,所谓的“保持磁通恒定”的结论也只在稳态情况下才能成立。在动态中如何变化还没有深入研究,但肯定不会恒定,这不得不影响系统的实际动态性能。
(2)Us = f ( , Is) 函数关系中只抓住了定子电流的幅值,没有控制到电流的相位,而在动态中电流的相位也是影响转矩变化的因素。
(3)在频率控制环节中,取 = +,使频率得以与转速同步升降,这本是转差频率控制的优点。然而,如果转速检测信号不准确或存在干扰,也就会直接给频率造成误差,因为所有这些偏差和干扰都以正反馈的形式毫无衰减地传递到频率控制信号上来了。 |

