
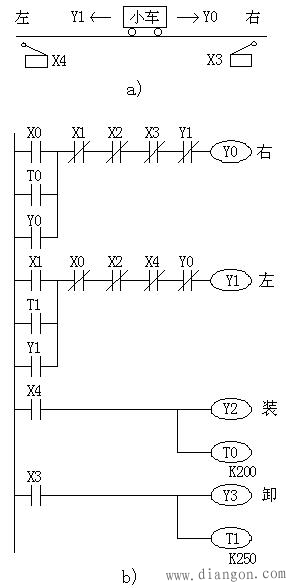
图1 送料小车自动控制
a)小车运行示意图 b)梯形图
(2)程序设计思路 以众所周知的电动机正反转控制的梯形图为基础,设计出的小车控制梯形图如图1b所示。为使小车自动停止,将X3和X4的常闭触点分别与Y0和Y1的线圈串联。为使小车自动起动,将控制装、卸料延时的定时器T0和T1的常开触点,分别与手动起动右行和左行的X0、X1的常开触点并联,并用两个限位开关对应的X4和X3的常开触点分别接通装料、卸料电磁阀和相应的定时器。
(3)程序分析 设小车在起动时是空车,按下左行起动按钮X1,Y1得电,小车开始左行,碰到左限位开关时,X4的常闭触点断开,使Y1失电,小车停止左行。X4的常开触点接通,使Y2和T0的线圈得电,开始装料和延时。20s后T0的常开触点闭合,使Y0得电,小车右行。小车离开左限位开关后,X4变为“0”状态,Y2和T0的线圈失电,停止装料,T0被复位。对右行和卸料过程的分析与上面的基本相同。如果小车正在运行时按停止按钮X2,小车将停止运动,系统停止工作。
2.两处卸料小车自动控制的梯形图程序设计
两处卸料小车运行路线示意图如图2a所示,小车仍然在限位开关X4处装料,但在X5和X3两处轮流卸料。小车在一个工作循环中有两次右行都要碰到X5,第一次碰到它时停下卸料,第二次碰到它时继续前进,因此应设置一个具有记忆功能的编程元件,区分是第一次还是第二次碰到X5。
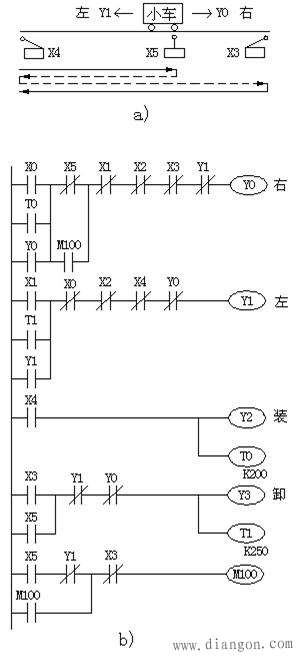
图2 两处卸料小车自动控制
a)小车运行示意图 b)梯形图
两处卸料小车自动控制的梯形图如图2b所示,它是在图1b的基础上根据新的控制要求修改而成的。小车在第一次碰到X5和碰到X3时都应停止右行,所以将它们的常闭触点与Y0的线圈串联。其中X5的触点并联了中间元件M100的触点,使X5停止右行的作用受到M100的约束,M100的作用是记忆X5是第几次被碰到,它只在小车第二次右行经过X5时起作用。为了利用PLC已有的输入信号,用起保停电路来控制M100,它的起动条件和停止条件分别是小车碰到限位开关X5和X3,即M100在图2a中虚线所示路线内为ON,在这段时间内M100的常开触点将Y0控制电路中X5常闭触点短接,因此小车第二次经过X5时不会停止右行。
为了实现两处卸料,将X3和X5的触点并联后驱动Y3和T1。调试时发现小车从X3开始左行,经过X5时M100也被置位,使小车下一次右行到达X5时无法停止运行,因此在M100的起动电路中串入Y1的常闭触点。另外还发现小车往返经过X5时,虽然不会停止运动,但是出现了短暂的卸料动作,为此将Y1和Y0的常闭触点与Y3的线圈串联,就可解决这个问题。系统在装料和卸料时按停止按钮不能使系统停止工作,请读者考虑怎样解决这个问题。
二、经验设计法的特点
经验设计法对于一些比较简单程序设计是比较奏效的,可以收到快速、简单的效果。但是,由于这种方法主要是依靠设计人员的经验进行设计,所以对设计人员的要求也就比较高,特别是要求设计者有一定的实践经验,对工业控制系统和工业上常用的各种典型环节比较熟悉。经验设计法没有规律可遵循,具有很大的试探性和随意性,往往需经多次反复修改和完善才能符合设计要求,所以设计的结果往往不很规范,因人而异。
经验设计法一般适合于设计一些简单的梯形图程序或复杂系统的某一局部程序(如手动程序等)。如果用来设计复杂系统梯形图,存在以下问题:
1.考虑不周、设计麻烦、设计周期长
用经验设计法设计复杂系统的梯形图程序时,要用大量的中间元件来完成记忆、联锁、互锁等功能,由于需要考虑的因素很多,它们往往又交织在一起,分析起来非常困难,并且很容易遗漏一些问题。修改某一局部程序时,很可能会对系统其它部分程序产生意想不到的影响,往往花了很长时间,还得不到一个满意的结果。
2.梯形图的可读性差、系统维护困难
用经验设计法设计的梯形图是按设计者的经验和习惯的思路进行设计。因此,即使是设计者的同行,要分析这种程序也非常困难,更不用说维修人员了,这给PLC系统的维护和改进带来许多困难。

全站搜索