
| 一、不可逆PWM变换器 | |
 | |
 | |
 | |
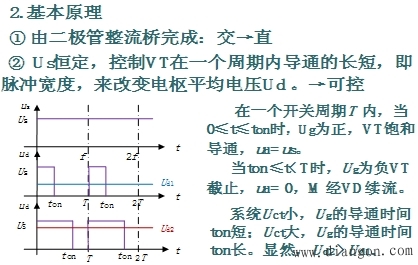
| 电机两端得到的平均电压为 | |
| 式中 ρ= ton / T 为 PWM 波形的占空比, 改变 ρ( 0 ≤ ρ < 1 )即可调节电机的转速。 PWM 脉宽调速系统如上述介绍有许多优点,但也存在缺点: ① 过压能力低,需保护; ② VT单向导电性,不可逆,无制动。 需要制动时,必须具有反向电流-id的通路,因此应再设置一个电力晶体管。 二、可逆PWM变换器 可逆PWM变换器主电路有H型、T型多种形式,最常用的是桥式(亦称H型)电路,如下图所示。 这时,电动机 M 两端电压的极性随开关器件基极驱动电压极性的变化而改变,其控制方式有双极式、单极式、受限单极式等多种,这里只着重分析最常用的双极式控制的可逆PWM变换器。 | |
 | |
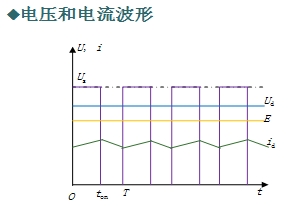
| 2. 工作状态与波形 ① 正向运行: ・在 0 ≤ t ≤ ton 期间, Ug1 =Ug4为正, VT1 、 VT4导通, Ug2 =Ug3为负,VT2 、 VT3截止,电流 id 沿回路1流通,电动机 M两端电压UAB = +Us ; ・在ton ≤ t ≤ T期间, Ug1 =Ug4为负, VT1 、 VT4截止;由于电感储存很大能量,放电,维持电流方向不变,这时通过VD2 、 VD3续流, 并钳位使VT2 、 VT3保持截止,电流 id 沿回路2流通,电动机 M两端电压UAB = Us 。 | |
 | |
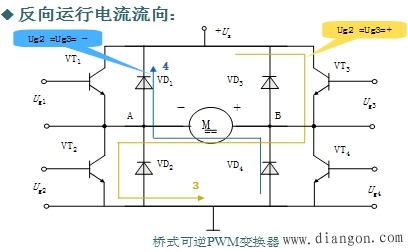
| ② 反向运行:先分析 ton→T 阶段 ・在ton ≤ t ≤ T 期间, Ug2 = Ug3 为正, VT2 、 VT3导通, Ug1 =Ug4为负,使VT1 、 VT4截止,电流 id 沿回路3流通,电动机M两端电压UAB = Us ; ・在 T≤ t ≤ T+ton ( 下一周期的0 ≤ t ≤ ton ) 期间, Ug2 = Ug3为负,VT2 、 VT3截止, VD1 、 VD4 续流,并钳位使 VT1 、 VT4截止,电流 id 沿回路4流通,电动机M两端电压UAB = +Us 。 | |
 | |
 | |
| ④ 输出平均电压 双极式控制可逆PWM变换器的输出平均电压为 | |
 | |
| | |
・当 |

全站搜索