
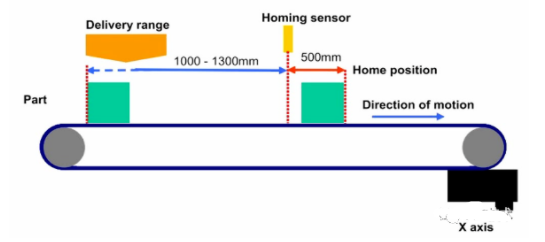
定位的基本概念:使指定对象按指定速度和轨迹运动到指定位置 运动控制需要有控制器(PLC)、驱动器、电机、机械等机械需要将位置和速度反馈给控制,形成一个闭环的控制;这样控制器就能知道机械的动态和位置信息
电机的速度和位置反馈给驱动器这也是一种闭环控制的方式,电机和驱动器之间形成一个闭环;或者电机将位置和速度反馈给控制器作为一个闭环

运动控制中关键的要素的位置和速度

a表示加速度 d表示减速度 s就是运行距离(位置)
伺服系统的概念和组成
什么是伺服系统?以物体的位置、方向、状态等为控制量,以跟踪输入目标值(或给定值)的任意变化为目的,所构成的自动控制系统。
伺服系统的组成:伺服系统具有反馈闭环的自动控制系统,由控制器、伺服驱动器、伺服电机和反馈装置组成
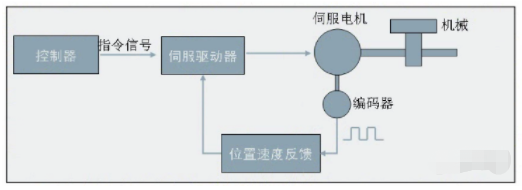
伺服驱动器的原理


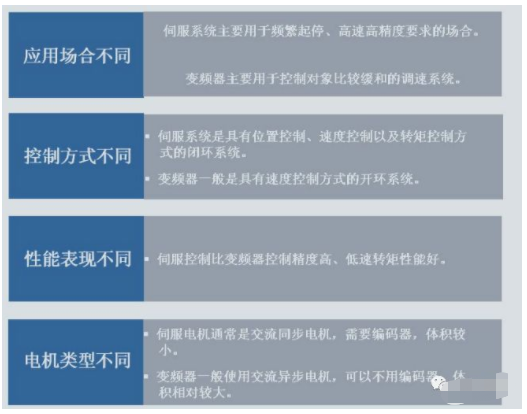
伺服与变频器的区别
伺服系统的三种控制方式
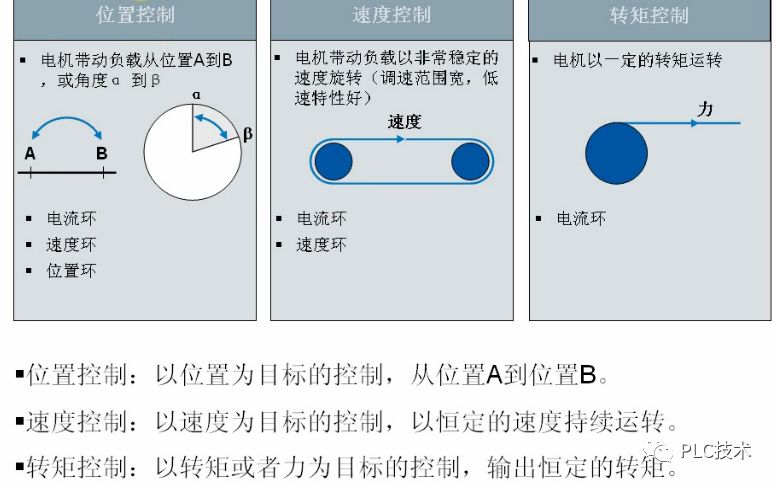
位置控制:以位置为目标的控制,从位置A到位置B
速度控制:以速度为目标的控制,以恒定的速度持续运转
转矩控制:以转矩或者力矩为目标的控制,输出恒定的转矩
小型自动化产品的运动控制有三种,分别是S7-200/200SMART /1200

审核编辑:汤梓红

全站搜索